Sep 19, 2024
TechnologyInstall with debian-12.7.0-amd64-DVD-1.iso. Select gnome/desktop/ssh server.

x86 steps
Configure the repository and update/upgrade:
root@debian:~# cat /etc/apt/sources.list
# 默认注释了源码仓库,如有需要可自行取消注释
deb http://mirrors.ustc.edu.cn/debian bookworm main contrib non-free non-free-firmware
# deb-src http://mirrors.ustc.edu.cn/debian bookworm main contrib non-free non-free-firmware
deb http://mirrors.ustc.edu.cn/debian bookworm-updates main contrib non-free non-free-firmware
# deb-src http://mirrors.ustc.edu.cn/debian bookworm-updates main contrib non-free non-free-firmware
# backports 软件源,请按需启用
# deb http://mirrors.ustc.edu.cn/debian bookworm-backports main contrib non-free non-free-firmware
# deb-src http://mirrors.ustc.edu.cn/debian bookworm-backports main contrib non-free non-free-firmware
# apt install -y nethogs vim iptables
Install necessary packages:
apt install -y ninja-build pkg-config libgbm1 libglib2.0-dev bridge-utils libfdt-dev libpixman-1-dev libssl-dev libsdl1.2-dev libspice-server-dev autoconf libtool xtightvncviewer tightvncserver x11vnc uuid-runtime uuid uml-utilities liblzma-dev libc6-dev libdrm-dev libgbm-dev spice-client-gtk libgtk2.0-dev libusb-1.0-0-dev libepoxy-dev libaio-dev libgtk-3-dev ovmf libsdl2-dev libegl-mesa0
apt install -y {libpulse,libdrm,libglm,libstb,libegl,libgles,libvulkan,vulkan-validationlayers}-dev
apt install -y libepoxy-dev libgbm-dev cmake curl python3-venv git build-essential meson
Prepare the code structure:
mkdir Code
cd Code
git clone https://gitlab.com/qemu-project/qemu.git
Build libvirglrenderer:
export PREFIX="$(pwd)"/prefix
git clone https://gitlab.freedesktop.org/virgl/virglrenderer.git
cd virglrenderer
meson setup -Dprefix=$PREFIX -Dlibdir=lib build
cd build
ninja install
build aemu (dependencies) Steps:
cd qemu
mkdir -p build/deps/prefix
cd build/deps
export PREFIX="$(pwd)"/prefix
export CMAKE_INSTALL_PREFIX="${PREFIX}"
export PKG_CONFIG_PATH="${PREFIX}/lib/pkgconfig":"${PREFIX}/lib/x86_64-linux-gnu/pkgconfig"
git clone https://android.googlesource.com/platform/hardware/google/aemu
cd aemu/
cmake -DAEMU_COMMON_GEN_PKGCONFIG=ON \
-DAEMU_COMMON_BUILD_CONFIG=gfxstream \
-DENABLE_VKCEREAL_TESTS=OFF \
--install-prefix "${PREFIX}" \
-B build
cmake --build build -j
cmake --install build --prefix "${CMAKE_INSTALL_PREFIX}"
build gfxstream steps:
cd ..
git clone https://android.googlesource.com/platform/hardware/google/gfxstream
cd gfxstream/
meson setup -Ddefault_library=static --prefix "${PREFIX}" build/
meson install -C build
rutabaga FFI:
cd ~/Code
git clone https://github.com/google/crosvm
export RUSTUP_UPDATE_ROOT=https://mirrors.ustc.edu.cn/rust-static/rustup
export RUSTUP_DIST_SERVER=https://mirrors.tuna.tsinghua.edu.cn/rustup
curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh
#curl https://sh.rustup.rs -sSf | sh
source $HOME/.cargo/env
source ~/.profile
rustup toolchain list | grep -q 1.68.2-x86_64-unknown-linux-gnu || rustup toolchain install 1.68.2-x86_64-unknown-linux-gnu
cd crosvm
git reset --hard cd04b6198dc89104de7748043585cf38c56cb626
export RUSTFLAGS='-Clink-arg=-L='"${PREFIX}"/lib/x86_64-linux-gnu/
cd rutabaga_gfx/ffi
make
make prefix="${PREFIX}" install
Build qemu:
mkdir -p /opt/local
cd ~/Code/qemu/build
export CFLAGS="-I${PREFIX}/include -L${PREFIX}/lib" # needed for rutabaga_gfx_ffi.h
#../configure --enable-system --enable-tools --enable-vhost-user --enable-slirp --enable-kvm --enable-debug --target-list=x86_64-softmmu --enable-rutabaga-gfx --prefix=/opt/local/
../configure --enable-system --enable-tools --enable-vhost-user --enable-slirp --enable-kvm --enable-debug --target-list=aarch64-softmmu --enable-rutabaga-gfx
make -j$(nproc)
su root


cuttlefish build
Steps:
usermod -aG sudo test
cd ~/Code
git clone https://github.com/google/android-cuttlefish
cd android-cuttlefish
tools/buildutils/build_packages.sh
sudo dpkg -i ./cuttlefish-base_*_*64.deb || sudo apt-get install -f
sudo dpkg -i ./cuttlefish-user_*_*64.deb || sudo apt-get install -f
sudo usermod -aG kvm,cvdnetwork,render $USER
mkdir cf
tar xzvf ../cvd-host_package.tar.gz && unzip ../aosp_cf_arm64_only_phone-img-11489887.zip
sudo reboot
should notice the aarch64 library replacement.
x86 tips
qemu version:
$ /home/test/Code/qemu/build/qemu-system-x86_64 --version
QEMU emulator version 9.1.50 (v9.1.0-384-g2b81c04625)
Copyright (c) 2003-2024 Fabrice Bellard and the QEMU Project developers
test@debian:~/cf$ sudo chmod 777 /usr/bin/qemu-system-x86_64
test@debian:~/cf$ sudo cat /usr/bin/qemu-system-x86_64
#!/bin/bash
/home/test/Code/qemu/build/qemu-system-x86_64 $@
Ubuntu2204 issue
When building gfxstream host:
git clone https://android.googlesource.com/platform/hardware/google/gfxstream
cd gfxstream/
meson setup host-build/
Get error:
Run-time dependency dl found: NO (tried pkgconfig and cmake)
host/meson.build:78:2: ERROR: Dependency "dl" not found, tried pkgconfig and cmake
cmake:
307 sudo apt remove cmake
308 sudo apt install libssl-dev
309 cd ..
310 ls
311 wget https://cmake.org/files/v3.29/cmake-3.29.2.tar.gz
312 tar -xzvf cmake-3.29.2.tar.gz
313 cd cmake-3.29.2
314 export OPENSSL_ROOT_DIR=/usr/include/openssl
315 ./bootstrap
316 make -j$(nproc)
317 sudo make install
318 which cmake
Sep 18, 2024
Technology1. crosvm
Default command:
HOME=$PWD ./bin/launch_cvd -cpus 6 -memory_mb 8192
Result:
vsoc_arm64_only:/ $ getprop | grep boot | grep com
[dev.bootcomplete]: [1]
[ro.boot.hardware.hwcomposer.display_finder_mode]: [drm]
[ro.boot.vendor.apex.com.google.emulated.camera.provider.hal]: [com.google.emulated.camera.provider.hal]
[sys.boot_completed]: [1]
[sys.bootstat.first_boot_completed]: [1]
vsoc_arm64_only:/ $ dumpsys SurfaceFlinger | grep GLES
------------RE GLES------------
GLES: Google Inc. (Google), ANGLE (Google, Vulkan 1.3.0 (SwiftShader Device (LLVM 16.0.0) (0x0000C0DE)), SwiftShader driver-5.0.0), OpenGL ES 3.1.0 (ANGLE 2.1.0 git hash: unknown hash)
(Start under Xorg :0)-gfxstream mode:
$ HOME=$PWD ./bin/launch_cvd -cpus 6 -memory_mb 8192 --gpu_mode=gfxstream
Result:
vsoc_arm64_only:/ $ getprop | grep boot | grep com
[dev.bootcomplete]: [1]
[ro.boot.hardware.hwcomposer.display_finder_mode]: [drm]
[ro.boot.vendor.apex.com.google.emulated.camera.provider.hal]: [com.google.emulated.camera.provider.hal]
[sys.boot_completed]: [1]
[sys.bootstat.first_boot_completed]: [1]
vsoc_arm64_only:/ $ dumpsys SurfaceFlinger | grep GLES
------------RE GLES------------
GLES: Google (AMD), Android Emulator OpenGL ES Translator (OLAND (, LLVM 15.0.7, DRM 2.50, 5.15.0-119-generic)), OpenGL ES 3.1 (OpenGL ES 3.2 Mesa 23.2.1-1ubuntu3.1~22.04.2)
$ HOME=$PWD ./bin/launch_cvd -cpus 6 -memory_mb 8192 --gpu_mode=guest_swiftshader:
vsoc_arm64_only:/ $ getprop | grep boot | grep com
[dev.bootcomplete]: [1]
[ro.boot.hardware.hwcomposer.display_finder_mode]: [drm]
[ro.boot.vendor.apex.com.google.emulated.camera.provider.hal]: [com.google.emulated.camera.provider.hal]
[sys.boot_completed]: [1]
[sys.bootstat.first_boot_completed]: [1]
vsoc_arm64_only:/ $ dumpsys SurfaceFlinger | grep GLES
------------RE GLES------------
GLES: Google Inc. (Google), ANGLE (Google, Vulkan 1.3.0 (SwiftShader Device (LLVM 16.0.0) (0x0000C0DE)), SwiftShader driver-5.0.0), OpenGL ES 3.1.0 (ANGLE 2.1.0 git hash: unknown hash)
$ HOME=$PWD ./bin/launch_cvd -cpus 6 -memory_mb 8192 --gpu_mode=auto:
vsoc_arm64_only:/ $ getprop | grep boot | grep com
[dev.bootcomplete]: [1]
[ro.boot.hardware.hwcomposer.display_finder_mode]: [drm]
[ro.boot.vendor.apex.com.google.emulated.camera.provider.hal]: [com.google.emulated.camera.provider.hal]
[sys.boot_completed]: [1]
[sys.bootstat.first_boot_completed]: [1]
vsoc_arm64_only:/ $ dumpsys SurfaceFlinger | grep GLES
------------RE GLES------------
GLES: Google Inc. (Google), ANGLE (Google, Vulkan 1.3.0 (SwiftShader Device (LLVM 16.0.0) (0x0000C0DE)), SwiftShader driver-5.0.0), OpenGL ES 3.1.0 (ANGLE 2.1.0 git hash: unknown hash)
2. qemu
virgl:
HOME=$PWD ./bin/launch_cvd -vm_manager qemu_cli -gpu_mode drm_virgl -enable_gpu_udmabuf -cpus 4 -memory_mb 4096
Result:
vsoc_arm64_only:/ $ getprop | grep boot | grep com
[dev.bootcomplete]: [1]
[ro.boot.hardware.hwcomposer.display_finder_mode]: [drm]
[ro.boot.hardware.hwcomposer.mode]: [client]
[ro.boot.vendor.apex.com.google.emulated.camera.provider.hal]: [com.google.emulated.camera.provider.hal]
[sys.boot_completed]: [1]
[sys.bootstat.first_boot_completed]: [1]
vsoc_arm64_only:/ $ dumpsys SurfaceFlinger | grep GLES
------------RE GLES------------
GLES: Mesa/X.org, virgl, OpenGL ES 3.2 Mesa 20.3.4 (git-1aa4951402)
gfxstream:
$ HOME=$PWD ./bin/launch_cvd -vm_manager qemu_cli -gpu_mode gfxstream -enable_gpu_udmabuf -cpus 4 -memory_mb 4096
Result:
--gpu_mode=gfxstream was requested but the prerequisites for accelerated rendering were not detected so the device may not function correctly. Please consider switching to --gpu_mode=auto or --gpu_mode=guest_swiftshader.
GPU vhost user auto mode: not yet supported with qemu_cli. Not enabling vhost user gpu.
assemble_cvd failed:
Sep 13, 2024
Technology安装以下依赖包:
sudo apt install -y build-essential git vim m4 bison flex zlib1g-dev libncurses5-dev intltool libtool gperf libcap-dev libblkid-dev libmount-dev xsltproc docbook-xsl autopoint libgpgme11-dev libdevmapper-dev libdw-dev libdw1 libssl-dev libevent-dev
创建编译目录:
mkdir Code
mkdir -p Code/coreboot
cd Code/coreboot
git clone http://review.coreboot.org/p/coreboot
cd coreboot/
git checkout tags/4.6 -b local46
wget https://fossies.org/linux/misc/old/libelf-0.8.13.tar.gz
mkdir -p util/crossgcc
mv libelf-0.8.13.tar.gz util/crossgcc/tarballs/
vim util/crossgcc/buildgcc
IASL_ARCHIVE="https://downloadmirror.intel.com/774735/acpica-unix2-${IASL_VERSION}.tar.gz"
make crossgcc CPUS=`nproc`
make iasl CPUS=`nproc`
make menuconfig
编译systemd, 注意这里使用了特定版本的systemd:
cd ~/Code
mkdir systemd
cd systemd/
wget https://github.com/systemd/systemd/archive/refs/tags/v229.tar.gz
tar xzvf v229.tar.gz
mv systemd-229/ systemd
cd systemd/
./autogen.sh
mkdir build
cd build
../configure --prefix=/usr --enable-blkid --disable-seccomp --disable-libcurl --disable-pam --disable-kmod
make -j12
cd ../../../
编译kexec:
mkdir kexec
cd kexec
git clone git://git.kernel.org/pub/scm/utils/kernel/kexec/kexec-tools.git
cd kexec-tools
./bootstrap
./configure --prefix=/usr
vim /home/dash/Code/kexec/kexec-tools/kexec/arch/i386/x86-linux-setup.c
/#include <sys/random.h>
#include <linux/random.h>
#include <unistd.h>
#include <sys/syscall.h>
......
//if (getrandom(sd->rng_seed, sizeof(sd->rng_seed), GRND_NONBLOCK) !=
if (syscall(SYS_getrandom,sd->rng_seed, sizeof(sd->rng_seed), GRND_NONBLOCK) !=
make -j`nproc`
cd ../..
编译twin:
mkdir petitboot
cd petitboot/
git clone git://git.kernel.org/pub/scm/linux/kernel/git/geoff/libtwin.git
cd libtwin/
cp README.md README
./autogen.sh && make -j8 && sudo make install
cd ../../
编译petitboot:
cd petitboot/
wget https://git.raptorengineering.com/git/petitboot/snapshot/petitboot-1.4.3.tar.gz
tar xzvf petitboot-1.4.3.tar.gz
mv petitboot-1.4.3/ petitboot
cd petitboot/
./bootstrap
CPPFLAGS="-I../../systemd/systemd/src/libudev/" LDFLAGS="-L../../systemd/systemd/build/.libs/" ./configure --prefix=/usr --enable-static --disable-shared --enable-busybox --with-ncurses --without-twin-x11 --without-twin-fbdev --with-signed-boot
make -j12
cd ../../
编译busybox:
mkdir busybox
cd busybox
git clone git://git.busybox.net/busybox
cd busybox
make defconfig
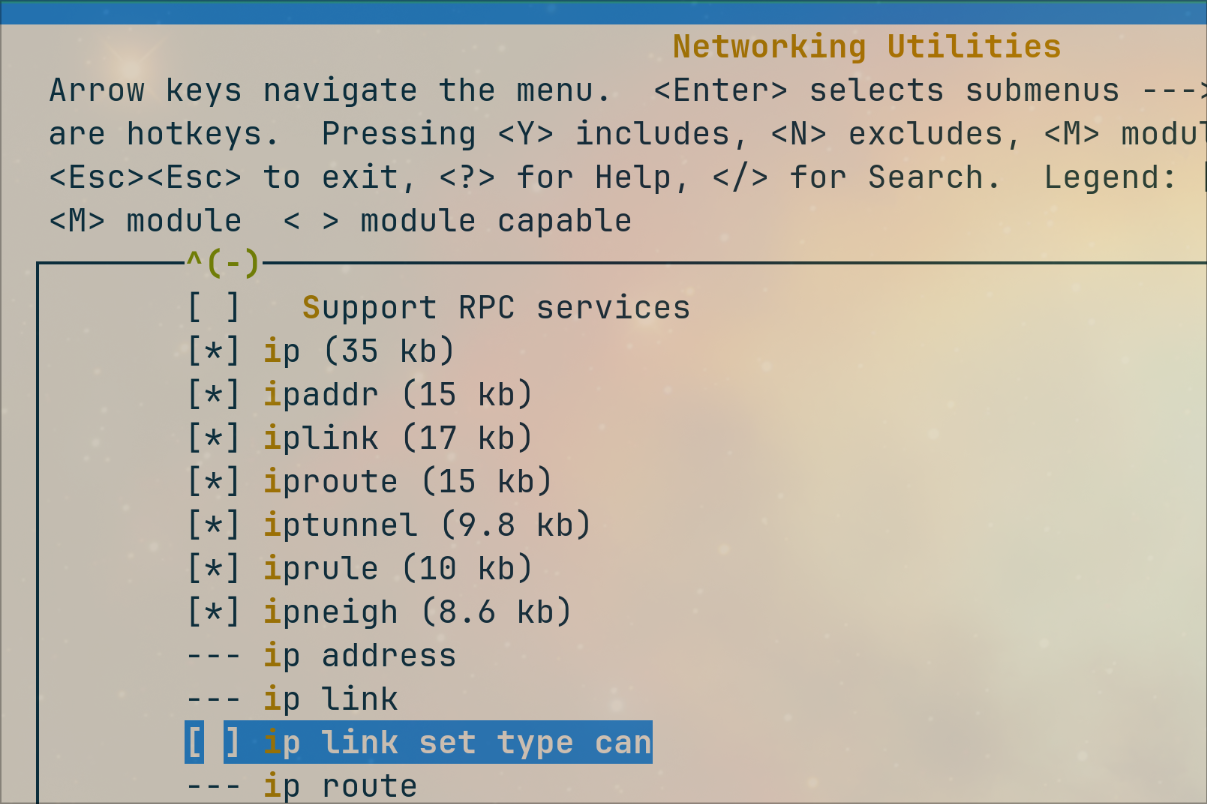
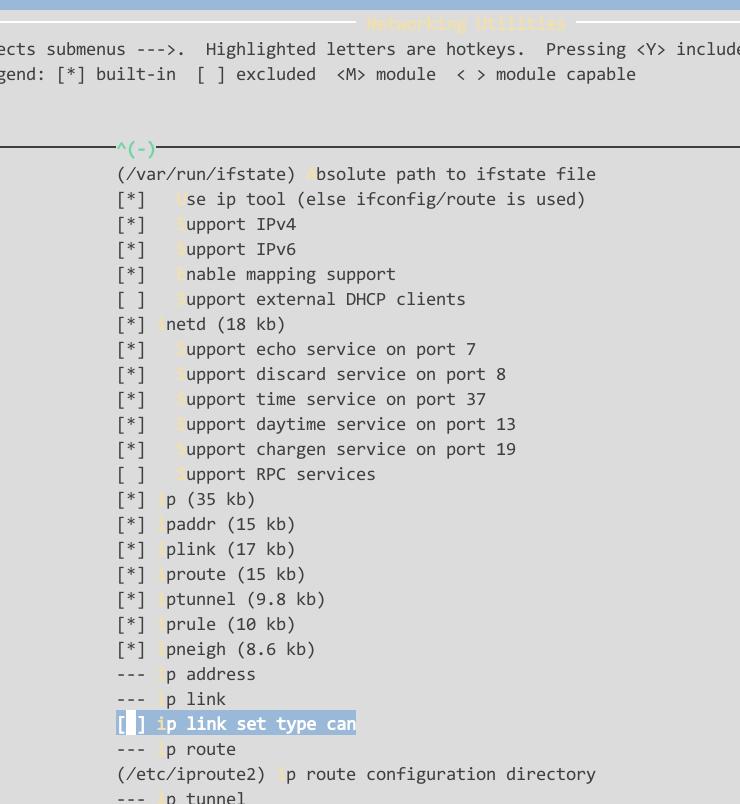
make menuconfig
LDFLAGS=--static make -j`nproc`
cd ../..
make menuconfig时,去掉下面这个选项:
现在需要编译一个最小化的initramfs, 准备基本的目录架构:
mkdir initramfs
mkdir -p initramfs/{bin,sbin,etc,lib,proc,sys,newroot,usr,usr/bin,usr/sbin,var,var/log,run,run/udev,tmp}
mkdir initramfs/var/log/petitboot
touch initramfs/etc/mdev.conf
cp -Rp /lib/terminfo initramfs/lib/
cp -Rp busybox/busybox/busybox initramfs/bin/
ln -s busybox initramfs/bin/sh
从本机上拷贝核心库:
mkdir -p initramfs/lib/x86_64-linux-gnu
cp -L /lib/x86_64-linux-gnu/libc.so.* initramfs/lib/x86_64-linux-gnu/
cp -L /lib/x86_64-linux-gnu/libm.so.* initramfs/lib/x86_64-linux-gnu/
cp -L /lib/x86_64-linux-gnu/libdl.so.* initramfs/lib/x86_64-linux-gnu/
cp -L /lib/x86_64-linux-gnu/librt.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libacl.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libcap.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libattr.so.* initramfs/lib/x86_64-linux-gnu/
cp -L /lib/x86_64-linux-gnu/libpthread.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libncurses.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libtinfo.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libpcre.so.* initramfs/lib/x86_64-linux-gnu/
cp -L /lib/x86_64-linux-gnu/libresolv.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libselinux.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libreadline.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libgcc_s.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libblkid.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libkmod.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libuuid.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libusb-0.1.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libdevmapper.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libz.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/liblzma.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libbz2.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libgpg-error.so.* initramfs/lib/x86_64-linux-gnu/
cp -L /lib/x86_64-linux-gnu/libnss_files.so.* initramfs/lib/x86_64-linux-gnu/
mkdir -p initramfs/lib64/
cp -L /lib64/ld-linux-x86-64.so.* initramfs/lib64/
mkdir -p initramfs/usr/lib/x86_64-linux-gnu/
cp -R /usr/lib/x86_64-linux-gnu/libform.so.* initramfs/usr/lib/x86_64-linux-gnu/
cp -R /usr/lib/x86_64-linux-gnu/libmenu.so.* initramfs/usr/lib/x86_64-linux-gnu/
cp -L /usr/lib/x86_64-linux-gnu/libelf.so.* initramfs/usr/lib/x86_64-linux-gnu/
cp -L /usr/lib/x86_64-linux-gnu/libdw.so.* initramfs/usr/lib/x86_64-linux-gnu/
cp -R /usr/lib/x86_64-linux-gnu/libgpgme.so.* initramfs/usr/lib/x86_64-linux-gnu/
cp -R /usr/lib/x86_64-linux-gnu/libassuan.so.* initramfs/usr/lib/x86_64-linux-gnu/
复制辅助类的二进制文件到新的initramfs中:
cp -Rp /usr/bin/gpg initramfs/usr/bin/
cp systemd/systemd/build/.libs/libudev.so.* initramfs/lib/x86_64-linux-gnu/
cp -Rp systemd/systemd/build/systemd-udevd initramfs/sbin/
cp -Rp systemd/systemd/build/udevadm initramfs/sbin/
mkdir -p initramfs/usr/lib/udev
cp -Rp systemd/systemd/build/*_id initramfs/usr/lib/udev
cp -Rp kexec/kexec-tools/build/sbin/kexec initramfs/sbin/
安装petitboot到新的initramfs中:
cd petitboot/petitboot
make DESTDIR=`realpath ../../initramfs/` install
cd ../..
拷贝udev规则到新的initramfs中:
mkdir -p initramfs/usr/lib/udev/rules.d
cp -Rp systemd/systemd/rules/* initramfs/usr/lib/udev/rules.d/
cp -Rp systemd/systemd/build/rules/* initramfs/usr/lib/udev/rules.d/
rm -f initramfs/usr/lib/udev/rules.d/*-drivers.rules
设置udhcp辅助脚本:
mkdir -p initramfs/usr/share/udhcpc/
cp -Rp busybox/busybox/examples/udhcp/simple.script initramfs/usr/share/udhcpc/simple.script
chmod 755 initramfs/usr/share/udhcpc/simple.script
sed -i '/should be called from udhcpc/d' initramfs/usr/share/udhcpc/simple.script
cat << EOF > initramfs/usr/share/udhcpc/default.script
#!/bin/sh
/usr/share/udhcpc/simple.script "\$@"
/usr/sbin/pb-udhcpc "\$@"
EOF
chmod 755 initramfs/usr/share/udhcpc/default.script
设置nsswitch:
touch initramfs/etc/nsswitch.conf
cat << EOF > initramfs/etc/nsswitch.conf
passwd: files
group: files
shadow: files
hosts: files
networks: files
protocols: files
services: files
ethers: files
rpc: files
netgroup: files
EOF
添加基本组:
touch initramfs/etc/group
cat << EOF > initramfs/etc/group
root:x:0:
daemon:x:1:
tty:x:5:
disk:x:6:
lp:x:7:
kmem:x:15:
dialout:x:20:
cdrom:x:24:
tape:x:26:
audio:x:29:
video:x:44:
input:x:122:
EOF
创建启动脚本,下面的脚本负责挂载特定目录,启动udev, 最后拉起petitboot, 也可以在此基础上更改为你自己的应用程序:
touch initramfs/init
cat << EOF > initramfs/init
#!/bin/sh
/bin/busybox --install -s
CURRENT_TIMESTAMP=\$(date '+%s')
if [ \$CURRENT_TIMESTAMP -lt `date '+%s'` ]; then
date -s "@`date '+%s'`"
fi
mount -t proc proc /proc
mount -t sysfs sysfs /sys
mount -t devtmpfs none /dev
echo 0 > /proc/sys/kernel/printk
clear
systemd-udevd &
udevadm hwdb --update
udevadm trigger
pb-discover &
petitboot-nc
if [ -e /etc/pb-lockdown ]; then
echo "Failed to launch petitboot, rebooting!"
echo 1 > /proc/sys/kernel/sysrq
echo b > /proc/sysrq-trigger
else
echo "Failed to launch petitboot, dropping to a shell"
exec sh
fi
EOF
chmod +x initramfs/init
去掉调试符号:
strip initramfs/sbin/*
strip initramfs/usr/sbin/*
strip initramfs/lib/x86_64-linux-gnu/*
strip initramfs/usr/lib/x86_64-linux-gnu/*
strip initramfs/usr/lib/udev/*_id
创建CPIO并压缩镜像:
cd initramfs
find . | cpio -H newc -o > ../initramfs.cpio
cd ..
cat initramfs.cpio | lzma > initramfs.igz
编译内核:
git clone https://git.kernel.org/pub/scm/linux/kernel/git/torvalds/linux.git
cd linux
git reset --hard 2dcd0af568b0cf583645c8a317dd12e344b1c72a
make menuconfig
make -j`nproc` bzImage
内核配置项中需要调整的部分:
Processor type and features --->
[*] kexec file based system call
[ ] Verify kernel signature during kexec_file_load() syscall
Device Drivers --->
Generic Driver Options --->
[ ] Include in-kernel firmware blobs in kernel binary
HID support --->
{*} HID bus support
<*> Generic HID driver
USB HID support --->
<*> USB HID transport layer
[*] USB support --->
<*> xHCI HCD (USB 3.0) support
{*} Generic xHCI driver for a platform device
<*> EHCI HCD (USB 2.0) support
<*> OHCI HCD (USB 1.1) support
<*> OHCI support for PCI-bus USB controllers
{*} Generic OHCI driver for a platform device
<*> UHCI HCD (most Intel and VIA) support
<*> USB Mass Storage support
<Enable all options in this category as kernel builtins except verbose debug>
Kernel hacking --->
Compile-time checks and compiler options --->
[ ] Compile the kernel with debug info
[ ] KGDB: kernel debugger ----
[ ] Enable verbose x86 bootup info messages
[ ] Early printk
[ ] Early printk via EHCI debug port
[ ] Early printk via the EFI framebuffer
File systems --->
-*- Native language support --->
General setup --->
Compiler optimization level (Optimize for size) --->
coreboot下,调整配置:
make menuconfig
General setup --->
[ ] Build the ramstage to be relocatable in 32-bit address space.
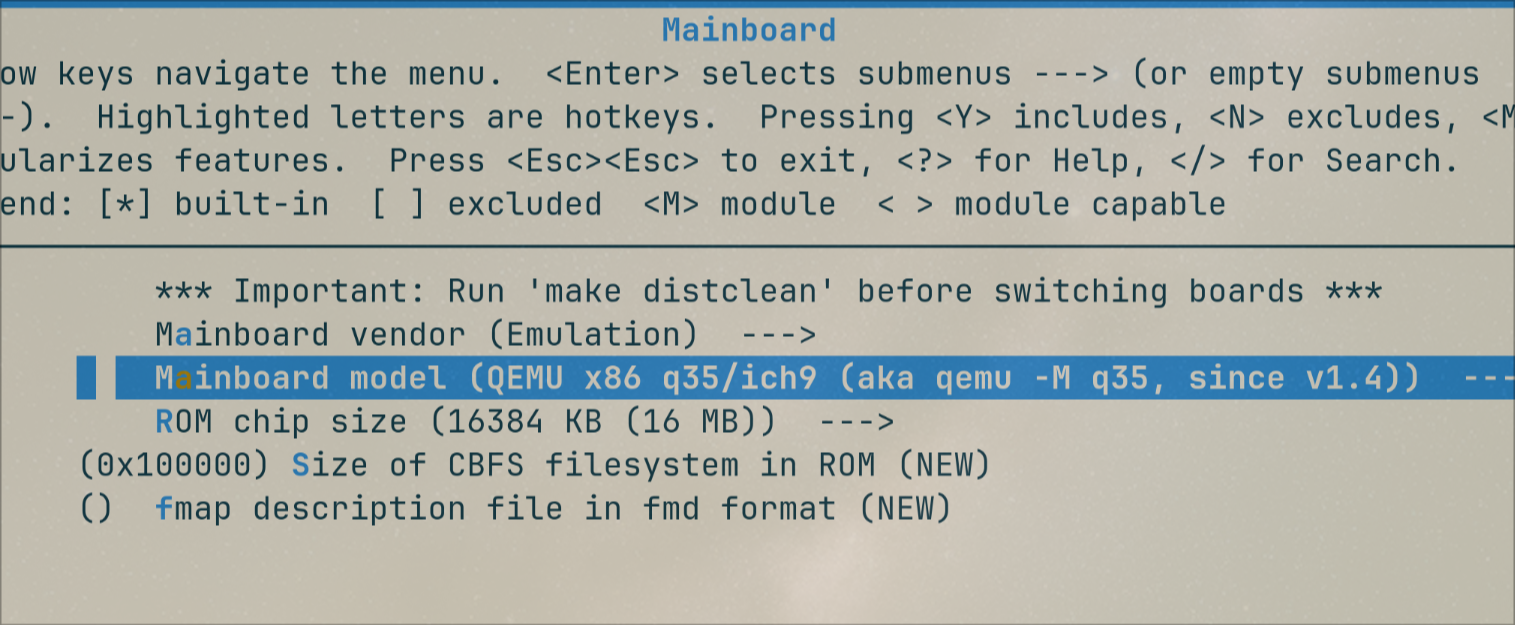
Mainboard --->
ROM chip size (16384 KB (16 MB)) --->
(0x1000000) Size of CBFS filesystem in ROM
Payload --->
Add a payload (A Linux payload) --->
(X) A Linux payload
Linux path and filename
../../linux/linux/arch/x86_64/boot/bzImage
Linux initrd
../../initramfs.igz
Linux command line
console=ttyS0,115200n8 console=tty0 panic=60 softlockup_panic=60 nmi_watchdog=1 quiet rw
这里我换成了q35:
编译, 而后启动:
make -j12
ls build/coreboot.rom -l -h
qemu-system-x86_64 -m 1G -M q35 -serial stdio -bios coreboot/coreboot/build/coreboot.rom
一个开启了ssh/vnc的命令行:
qemu-system-x86_64 -m 1G -M pc -boot d -cdrom ./ubuntu-18.04.6-server-amd64.iso -hda ./zzzz_1604.qcow2 -serial stdio -bios coreboot.rom -net nic -net user,hostfwd=tcp::2288-:22 -vga std -vnc :7
目前问题: q35启动有问题,i440无法使用光驱,图形无法使用等.
Sep 12, 2024
TechnologyBuilding coreboot Steps(half):
sudo apt install -y build-essential git vim
mkdir Code
cd Code
mkdir coreboot
cd coreboot/
git clone http://review.coreboot.org/p/coreboot
cd coreboot/
git checkout tags/4.6 -b local46
sudo apt install -y m4 bison flex zlib1g-dev libncurses5-dev
wget https://fossies.org/linux/misc/old/libelf-0.8.13.tar.gz
mv libelf-0.8.13.tar.gz util/crossgcc/tarballs/
history
vim util/crossgcc/buildgcc
IASL_ARCHIVE="https://downloadmirror.intel.com/774735/acpica-unix2-${IASL_VERSION}.tar.gz"
make crossgcc CPUS=`nproc`
make iasl CPUS=`nproc`
make menuconfig
Building systemd:
cd ~/Code
mkdir systemd
cd systemd/
wget https://github.com/systemd/systemd/archive/refs/tags/v229.tar.gz
tar xzvf v229.tar.gz
mv systemd-229/ systemd
cd systemd/
sudo apt install intltool
sudo apt install -y libtool
sudo apt install -y gperf
sudo apt install libcap-dev
sudo apt install -y libblkid-dev
sudo apt install -y libmount-dev
sudo apt install xsltproc
sudo apt install docbook-xsl
mkdir build
cd build
../configure --prefix=/usr --enable-blkid --disable-seccomp --disable-libcurl --disable-pam --disable-kmod
make -j12
Building kexec:
mkdir kexec
cd kexec
git clone git://git.kernel.org/pub/scm/utils/kernel/kexec/kexec-tools.git
cd kexec-tools
./bootstrap
./configure --prefix=/usr
vim /home/dash/Code/kexec/kexec-tools/kexec/arch/i386/x86-linux-setup.c
/#include <sys/random.h>
#include <linux/random.h>
#include <unistd.h>
#include <sys/syscall.h>
......
//if (getrandom(sd->rng_seed, sizeof(sd->rng_seed), GRND_NONBLOCK) !=
if (syscall(SYS_getrandom,sd->rng_seed, sizeof(sd->rng_seed), GRND_NONBLOCK) !=
make -j`nproc`
cd ../..
Building twin:
mkdir petitboot
cd petitboot/
git clone git://git.kernel.org/pub/scm/linux/kernel/git/geoff/libtwin.git
cd libtwin/
./autogen.sh
cp README.md README
./autogen.sh
make -j8
sudo make install
cd ../../
Building petitboot:
cd petitboot/
wget https://git.raptorengineering.com/git/petitboot/snapshot/petitboot-1.4.3.tar.gz
tar xzvf petitboot-1.4.3.tar.gz
mv petitboot-1.4.3/ petitboot
cd petitboot/
./bootstrap
sudo apt install -y autopoint
sudo apt install -y libgpgme11-dev
sudo apt install -y libdevmapper-dev
./bootstrap
CPPFLAGS="-I../../systemd/systemd/src/libudev/" LDFLAGS="-L../../systemd/systemd/build/.libs/" ./configure --prefix=/usr --enable-static --disable-shared --enable-busybox --with-ncurses --without-twin-x11 --without-twin-fbdev --with-signed-boot
make -j12
cd ../../
Building busybox:
mkdir busybox
cd busybox
git clone git://git.busybox.net/busybox
cd busybox
make defconfig
make menuconfig
LDFLAGS=--static make -j`nproc`
cd ../..
Install dw packages:
sudo apt install -y libdw-dev libdw1
Initramfs Build
Now that the helper applications have been built, a minimal initramfs can be assembled.
The following commands assume you are building the firmware image on a 64-bit x86 system for a 64-bit x86 target. Please replace "x86_64-linux-gnu" with the correct architecture tuple as needed. As an example, on a ppc64el system the "powerpc64le-linux-gnu" tuple would be used instead.
Prepare the skeleton directory structure
mkdir initramfs
mkdir -p initramfs/{bin,sbin,etc,lib,proc,sys,newroot,usr,usr/bin,usr/sbin,var,var/log,run,run/udev,tmp}
mkdir initramfs/var/log/petitboot
touch initramfs/etc/mdev.conf
cp -Rp /lib/terminfo initramfs/lib/
cp -Rp busybox/busybox/busybox initramfs/bin/
ln -s busybox initramfs/bin/sh
Copy core libraries to the new initramfs
mkdir -p initramfs/lib/x86_64-linux-gnu
cp -L /lib/x86_64-linux-gnu/libc.so.* initramfs/lib/x86_64-linux-gnu/
cp -L /lib/x86_64-linux-gnu/libm.so.* initramfs/lib/x86_64-linux-gnu/
cp -L /lib/x86_64-linux-gnu/libdl.so.* initramfs/lib/x86_64-linux-gnu/
cp -L /lib/x86_64-linux-gnu/librt.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libacl.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libcap.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libattr.so.* initramfs/lib/x86_64-linux-gnu/
cp -L /lib/x86_64-linux-gnu/libpthread.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libncurses.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libtinfo.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libpcre.so.* initramfs/lib/x86_64-linux-gnu/
cp -L /lib/x86_64-linux-gnu/libresolv.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libselinux.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libreadline.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libgcc_s.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libblkid.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libkmod.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libuuid.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libusb-0.1.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libdevmapper.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libz.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/liblzma.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libbz2.so.* initramfs/lib/x86_64-linux-gnu/
cp -R /lib/x86_64-linux-gnu/libgpg-error.so.* initramfs/lib/x86_64-linux-gnu/
cp -L /lib/x86_64-linux-gnu/libnss_files.so.* initramfs/lib/x86_64-linux-gnu/
mkdir -p initramfs/lib64/
cp -L /lib64/ld-linux-x86-64.so.* initramfs/lib64/
mkdir -p initramfs/usr/lib/x86_64-linux-gnu/
cp -R /usr/lib/x86_64-linux-gnu/libform.so.* initramfs/usr/lib/x86_64-linux-gnu/
cp -R /usr/lib/x86_64-linux-gnu/libmenu.so.* initramfs/usr/lib/x86_64-linux-gnu/
cp -L /usr/lib/x86_64-linux-gnu/libelf.so.* initramfs/usr/lib/x86_64-linux-gnu/
cp -L /usr/lib/x86_64-linux-gnu/libdw.so.* initramfs/usr/lib/x86_64-linux-gnu/
cp -R /usr/lib/x86_64-linux-gnu/libgpgme.so.* initramfs/usr/lib/x86_64-linux-gnu/
cp -R /usr/lib/x86_64-linux-gnu/libassuan.so.* initramfs/usr/lib/x86_64-linux-gnu/
Copy helper binaries to the new initramfs
cp -Rp /usr/bin/gpg initramfs/usr/bin/
cp systemd/systemd/build/.libs/libudev.so.* initramfs/lib/x86_64-linux-gnu/
cp -Rp systemd/systemd/build/systemd-udevd initramfs/sbin/
cp -Rp systemd/systemd/build/udevadm initramfs/sbin/
mkdir -p initramfs/usr/lib/udev
cp -Rp systemd/systemd/build/*_id initramfs/usr/lib/udev
cp -Rp kexec/kexec-tools/build/sbin/kexec initramfs/sbin/
Install petitboot itself to the initramfs
cd petitboot/petitboot
make DESTDIR=`realpath ../../initramfs/` install
cd ../..
Copy udev rules to the new initramfs
mkdir -p initramfs/usr/lib/udev/rules.d
cp -Rp systemd/systemd/rules/* initramfs/usr/lib/udev/rules.d/
cp -Rp systemd/systemd/build/rules/* initramfs/usr/lib/udev/rules.d/
rm -f initramfs/usr/lib/udev/rules.d/*-drivers.rules
Set up udhcp helper scripts
mkdir -p initramfs/usr/share/udhcpc/
cp -Rp busybox/busybox/examples/udhcp/simple.script initramfs/usr/share/udhcpc/simple.script
chmod 755 initramfs/usr/share/udhcpc/simple.script
sed -i '/should be called from udhcpc/d' initramfs/usr/share/udhcpc/simple.script
cat << EOF > initramfs/usr/share/udhcpc/default.script
#!/bin/sh
/usr/share/udhcpc/simple.script "\$@"
/usr/sbin/pb-udhcpc "\$@"
EOF
chmod 755 initramfs/usr/share/udhcpc/default.script
Set up nsswitch
touch initramfs/etc/nsswitch.conf
cat << EOF > initramfs/etc/nsswitch.conf
passwd: files
group: files
shadow: files
hosts: files
networks: files
protocols: files
services: files
ethers: files
rpc: files
netgroup: files
EOF
Add basic groups
touch initramfs/etc/group
cat << EOF > initramfs/etc/group
root:x:0:
daemon:x:1:
tty:x:5:
disk:x:6:
lp:x:7:
kmem:x:15:
dialout:x:20:
cdrom:x:24:
tape:x:26:
audio:x:29:
video:x:44:
input:x:122:
EOF
Create boot script
The following script is automatically used on every system start to mount needed special directories, start udev, and finally launch petitboot. It can be customized as required for your particular application.
touch initramfs/init
cat << EOF > initramfs/init
#!/bin/sh
/bin/busybox --install -s
CURRENT_TIMESTAMP=\$(date '+%s')
if [ \$CURRENT_TIMESTAMP -lt `date '+%s'` ]; then
date -s "@`date '+%s'`"
fi
mount -t proc proc /proc
mount -t sysfs sysfs /sys
mount -t devtmpfs none /dev
echo 0 > /proc/sys/kernel/printk
clear
systemd-udevd &
udevadm hwdb --update
udevadm trigger
pb-discover &
petitboot-nc
if [ -e /etc/pb-lockdown ]; then
echo "Failed to launch petitboot, rebooting!"
echo 1 > /proc/sys/kernel/sysrq
echo b > /proc/sysrq-trigger
else
echo "Failed to launch petitboot, dropping to a shell"
exec sh
fi
EOF
chmod +x initramfs/init
OPTIONAL: Set up GPG keyring for signed or encrypted boot
If you are setting up GPG signature checking or encryption, you will need to export the public key of your GPG kernel signer account, in ASCII format, to the file "public_key.txt". For encrypted kernels, you will also need to export the machine's private key in ASCII format to the file "private_key.txt". The machine private key is a specific, dedicated GPG account that should be created only for a single machine; encrypted kernels will use this GPG account as the recipient and the kernel signer as the source GPG account. Both files should be placed in the petitboot build root directory, and the private key (if present) should be chmod 600 (read/write by owner only).
WARNING: DO NOT export your personal private key, the private key of the kernel signer, or any other private keys from your GPG keyring! They are not needed by the build process.
mkdir initramfs/etc/gpg
gpg --homedir=initramfs/etc/gpg --import public_key.txt
gpg --homedir=initramfs/etc/gpg --import private_key.txt
echo "`gpg --homedir=initramfs/etc/gpg --fingerprint | grep "Key fingerprint" | sed 's/.*Key fingerprint = //g' \
| sed 's/ //g'`:6:" | gpg --homedir=initramfs/etc/gpg --import-ownertrust
chown -R root initramfs/etc/gpg
chgrp -R root initramfs/etc/gpg
chmod -R 400 initramfs/etc/gpg
To only boot signed kernels, execute the following commands:
echo "`gpg --homedir=initramfs/etc/gpg --fingerprint | grep "Key fingerprint" | sed 's/.*Key fingerprint = //g' \
| sed 's/ //g'`" >> initramfs/etc/pb-lockdown
To only boot kernels that have been both encrypted and signed, execute the following commands:
echo "ENCRYPTED" > initramfs/etc/pb-lockdown
echo "`gpg --homedir=initramfs/etc/gpg --fingerprint | grep "Key fingerprint" | sed 's/.*Key fingerprint = //g' \
| sed 's/ //g'`" >> initramfs/etc/pb-lockdown
Strip debug symbols from files installed in the initramfs
This step is crucial to reduce the initramfs size down to a range that will fit on a typical Flash ROM. Leaving unstripped binaries with debug symbols intact can more than double the size of the compressed initramfs!
strip initramfs/sbin/*
strip initramfs/usr/sbin/*
strip initramfs/lib/x86_64-linux-gnu/*
strip initramfs/usr/lib/x86_64-linux-gnu/*
strip initramfs/usr/lib/udev/*_id
CPIO creation and image compression
cd initramfs
find . | cpio -H newc -o > ../initramfs.cpio
cd ..
cat initramfs.cpio | lzma > initramfs.igz
Building kernel:
git clone https://git.kernel.org/pub/scm/linux/kernel/git/torvalds/linux.git
cd linux
git reset --hard 2dcd0af568b0cf583645c8a317dd12e344b1c72a
make menuconfig
sudo apt install libssl-dev
make -j`nproc` bzImage
Menuconfig:
Processor type and features --->
[*] kexec file based system call
[ ] Verify kernel signature during kexec_file_load() syscall
Device Drivers --->
Generic Driver Options --->
[ ] Include in-kernel firmware blobs in kernel binary
HID support --->
{*} HID bus support
<*> Generic HID driver
USB HID support --->
<*> USB HID transport layer
[*] USB support --->
<*> xHCI HCD (USB 3.0) support
{*} Generic xHCI driver for a platform device
<*> EHCI HCD (USB 2.0) support
<*> OHCI HCD (USB 1.1) support
<*> OHCI support for PCI-bus USB controllers
{*} Generic OHCI driver for a platform device
<*> UHCI HCD (most Intel and VIA) support
<*> USB Mass Storage support
<Enable all options in this category as kernel builtins except verbose debug>
Kernel hacking --->
Compile-time checks and compiler options --->
[ ] Compile the kernel with debug info
[ ] KGDB: kernel debugger ----
[ ] Enable verbose x86 bootup info messages
[ ] Early printk
[ ] Early printk via EHCI debug port
[ ] Early printk via the EFI framebuffer
File systems --->
-*- Native language support --->
General setup --->
Compiler optimization level (Optimize for size) --->
coreboot(second stage)
Now we could build:
make -j12
Verify the result:
ls build/coreboot.rom -l -h
-rw-rw-r-- 1 dash dash 16M 9月 12 23:35 build/coreboot.rom
Verification:
qemu-system-x86_64 -m 1G -M q35 -serial stdio -bios coreboot/coreboot/build/coreboot.rom
Sep 11, 2024
TechnologyChange sshd configuration:
$ sudo cat /etc/ssh/sshd_config.d/50-cloud-init.conf
PasswordAuthentication yes
$ sudo sed -i 's@//ports.ubuntu.com@//mirrors.ustc.edu.cn@g' /etc/apt/sources.list.d/ubuntu.sources
sudo apt update -y && sudo apt upgrade -y , then reboot.
Build cuttlefish:
git clone https://github.com/google/android-cuttlefish
cd android-cuttlefish
tools/buildutils/build_packages.sh
Install:
sudo dpkg -i ./cuttlefish-base_*_*64.deb || sudo apt-get install -f
sudo dpkg -i ./cuttlefish-user_*_*64.deb || sudo apt-get install -f
sudo usermod -aG kvm,cvdnetwork,render $USER
sudo apt install -y libvirglrenderer-dev libvirglrenderer1
sudo reboot
Prepare packages:
mkdir cf
cd cf
tar xzvf /media/test/78739a87-9b0b-4935-902f-7d78cc09a076/home/test/cvd-host_package.tar.gz
unzip /media/test/78739a87-9b0b-4935-902f-7d78cc09a076/home/test/aosp_cf_arm64_only_phone-img-11489887.zip
maybe should use --gpu_mode=guest_swiftshader
