
Linux2.6.32 for Utu2440(7)
Oct 28, 2014
Technology
Watchdog
Change the configuraiton of Watchdog in kernel: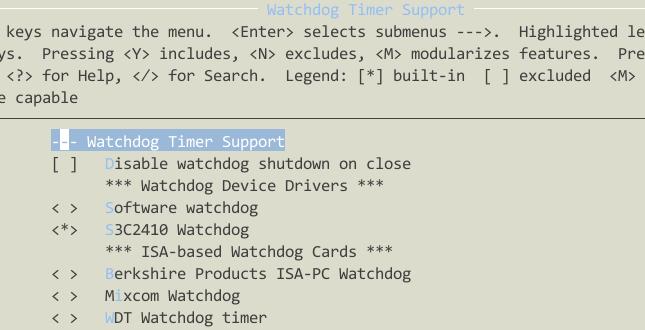
Watchdog configuraiton in kernel:
$ grep "CONFIG_S3C2410_WATCHDOG_DEFAULT_TIME" ./ -r
./drivers/watchdog/s3c2410_wdt.c:#define CONFIG_S3C2410_WATCHDOG_DEFAULT_TIME (15)
Test Watchdog:
~ # dmesg | grep watchdog
s3c2410-wdt s3c2410-wdt: watchdog inactive, reset disabled, irq enabled
~ #
~ # echo 0>/dev/watchdog
s3c2410-wdt s3c2410-wdt: Unexpected close, not stopping watchdog
Then after 15 seconds your board will reset, disable watchdog via:
~ # echo -n V>/dev/watchdog
LED
The connection for LED is: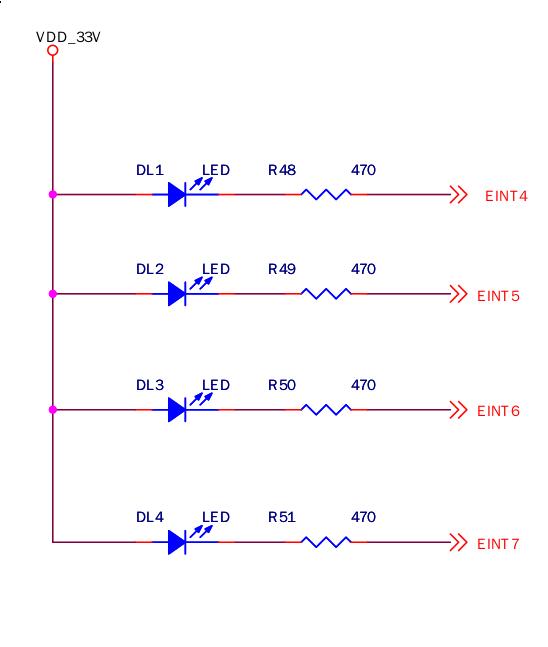
Saw s3c2440 chip connection: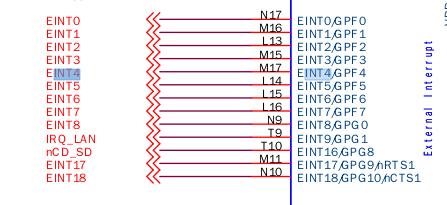
Connection in text:
EINT4 GPF4 DL1
EINT5 GPF5 DL2
EINT6 GPF6 DL3
EINT7 GPF7 DL4
Code changes:
#include <linux/miscdevice.h>
#include <linux/delay.h>
#include <asm/irq.h>
#include <mach/regs-gpio.h>
#include <mach/hardware.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/init.h>
#include <linux/mm.h>
#include <linux/fs.h>
#include <linux/types.h>
#include <linux/delay.h>
#include <linux/moduleparam.h>
#include <linux/slab.h>
#include <linux/errno.h>
#include <linux/ioctl.h>
#include <linux/cdev.h>
#include <linux/string.h>
#include <linux/list.h>
#include <linux/pci.h>
#include <linux/gpio.h>
#include <asm/uaccess.h>
#include <asm/atomic.h>
#include <asm/unistd.h>
#define DEVICE_NAME "leds" //设备名(/dev/leds)
//LED 对应的GPIO 端口列表
static unsigned long led_table [] = {
S3C2410_GPF(4),
S3C2410_GPF(5),
S3C2410_GPF(6),
S3C2410_GPF(7),
};
//LED 对应端口将要输出的状态列表
static unsigned int led_cfg_table [] = {
S3C2410_GPIO_OUTPUT,
S3C2410_GPIO_OUTPUT,
S3C2410_GPIO_OUTPUT,
S3C2410_GPIO_OUTPUT,
};
/*ioctl 函数的实现
* 在应用/用户层将通过ioctl 函数向内核传递参数,以控制LED 的输出状态
*/
static int leds_ioctl(struct inode *inode,
struct file *file,
unsigned int cmd,
unsigned long arg)
{
switch(cmd) {
case 0:
case 1:
if (arg > 4) {
return -EINVAL;
}
//根据应用/用户层传递来的参数(取反),通过s3c2410_gpio_setpin 函数设置LED 对应的端口寄存器
s3c2410_gpio_setpin(led_table[arg], !cmd);
return 0;
default:
return -EINVAL;
}
}
/*
* 设备函数操作集,在此只有ioctl 函数,通常还有read, write, open, close 等,因为本LED 驱动在下面已经
* 注册为misc 设备,因此也可以不用open/close
*/
static struct file_operations dev_fops = {
.owner = THIS_MODULE,
.ioctl = leds_ioctl,
};
/*
* 把LED 驱动注册为MISC 设备
*/
static struct miscdevice misc = {
.minor = MISC_DYNAMIC_MINOR, //动态设备号
.name = DEVICE_NAME,
.fops = &dev_fops,
};
/*
* 设备初始化
*/
static int __init dev_init(void)
{
int ret;
int i;
for (i = 0; i < 4; i++) {
//设置LED 对应的端口寄存器为输出(OUTPUT)
s3c2410_gpio_cfgpin(led_table[i], led_cfg_table[i]);
//设置LED 对应的端口寄存器为低电平输出,在模块加载结束后,四个LED 应该是全部都是发光状态
s3c2410_gpio_setpin(led_table[i], 0);
}
ret = misc_register(&misc); //注册设备
if(ret < 0)
{
printk(DEVICE_NAME "register falid!\n");
return ret;
}
printk (DEVICE_NAME "\tinitialized\n"); //打印初始化信息
return 0;
}
static void __exit dev_exit(void)
{
misc_deregister(&misc);
}
//模块初始化,仅当使用insmod/podprobe 命令加载时有用,如果设备不是通过模块方式加载,此处将不会被调用
module_init(dev_init);
//卸载模块,当该设备通过模块方式加载后,可以通过rmmod 命令卸载,将调用此函数
module_exit(dev_exit);
MODULE_LICENSE("GPL"); //版权信息
MODULE_AUTHOR("singleboy."); //开发者信息
Change Kconfig file:
config LEDS_SMDK2440
tristate "LED Support for SMDK2440 GPIO LEDs"
depends on SMDK2440_CPU2440
default y if SMDK2440_CPU2440
help
This option enables support for LEDs connected to GPIO lines
on SMDK2440 boards.
And the Makefile
obj-$(CONFIG_LEDS_SMDK2440) += smdk2440_leds.o
Rebuild the kernel and verify.
Test file:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/ioctl.h>
int main(int argc, char **argv)
{
int on;
int led_no;
int fd;
if (argc != 3 || sscanf(argv[1], "%d", &led_no) != 1 || sscanf(argv[2],"%d", &on) != 1 ||
on < 0 || on > 1 || led_no < 0 || led_no > 3) {
fprintf(stderr, "Usage: leds led_no 0|1\n");
exit(1);
}
fd = open("/dev/leds0", 0);
if (fd < 0) {
fd = open("/dev/leds", 0);
}
if (fd < 0) {
perror("open device leds");
exit(1);
}
ioctl(fd, on, led_no);
close(fd);
return 0;
}
Then run test like:
/root # ./led 0 0
/root # ./led 1 0
/root # ./led 2 0
/root # ./led 2 1
/root # ./led 2 0
/root # ./led 3 0
Write a simple script
while true
do
./led 0 0
sleep 1
./led 0 1
sleep 1
./led 1 0
sleep 1
./led 1 1
sleep 1
./led 2 0
sleep 1
./led 2 1
sleep 1
./led 3 0
sleep 1
./led 3 1
done
Now you could see led blinks.
Keys
First view the schematic to find the circle connection: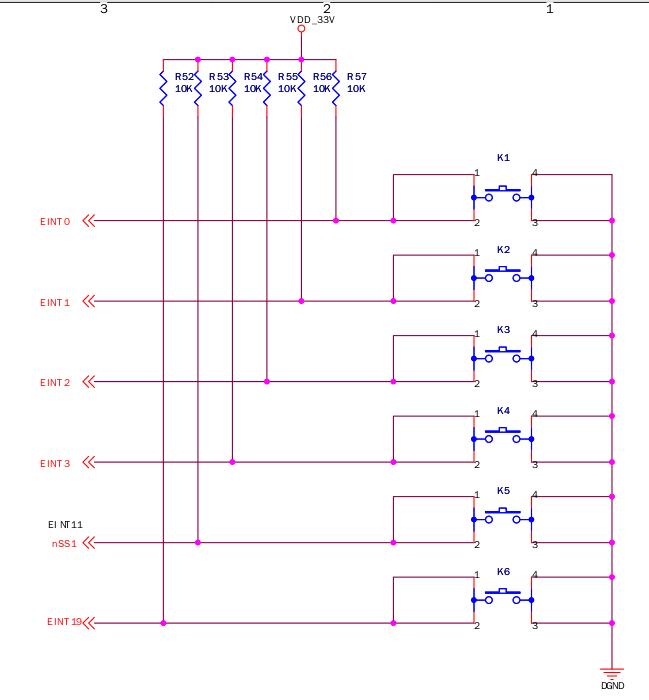
Keys connection:
K1 EINT0 GPF0
K2 EINT1 GPF1
K3 EINT2 GPF2
K4 EINT3 GPF3
K5 EINT11 GPG3
K6 EINT19 GPG11
The definition should be adjusted to the keys connection definition.
Edit the drivers/misc/smdk2440_buttons.c:
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/init.h>
#include <linux/delay.h>
#include <linux/poll.h>
#include <linux/irq.h>
#include <asm/irq.h>
#include <linux/interrupt.h>
#include <asm/uaccess.h>
#include <mach/regs-gpio.h>
#include <mach/hardware.h>
#include <linux/platform_device.h>
#include <linux/cdev.h>
#include <linux/miscdevice.h>
#include <linux/sched.h>
#include <linux/gpio.h>
#define DEVICE_NAME "buttons" //设备名称
/*定义中断所用的结构体*/
struct button_irq_desc {
int irq; //按键对应的中断号
int pin; //按键所对应的GPIO 端口
int pin_setting; //按键对应的引脚描述,实际并未用到,保留
int number; //定义键值,以传递给应用层/用户态
char *name; //每个按键的名称
};
/*结构体实体定义*/
static struct button_irq_desc button_irqs [] = {
{IRQ_EINT0, S3C2410_GPF(0), S3C2410_GPF0_EINT0, 0, "KEY0"},
{IRQ_EINT1, S3C2410_GPF(1), S3C2410_GPF1_EINT1, 1, "KEY1"},
{IRQ_EINT2, S3C2410_GPF(2), S3C2410_GPF2_EINT2, 2, "KEY2"},
{IRQ_EINT3, S3C2410_GPF(3), S3C2410_GPF3_EINT3, 3, "KEY3"},
{IRQ_EINT11, S3C2410_GPG(3), S3C2410_GPG3_EINT11, 4, "KEY4"},
{IRQ_EINT19, S3C2410_GPG(11), S3C2410_GPG11_EINT19, 5, "KEY5"},
};
/*开发板上按键的状态变量,注意这里是’0’,对应的ASCII 码为30*/
static volatile char key_values [] = {'0', '0', '0', '0', '0', '0'};
/*因为本驱动是基于中断方式的,在此创建一个等待队列,以配合中断函数使用;当有按键按下并读取到键
值时,将会唤醒此队列,并设置中断标志,以便能通过 read 函数判断和读取键值传递到用户态;当没有按
键按下时,系统并不会轮询按键状态,以节省时钟资源*/
static DECLARE_WAIT_QUEUE_HEAD(button_waitq);
/*中断标识变量,配合上面的队列使用,中断服务程序会把它设置为1,read 函数会把它清零*/
static volatile int ev_press = 0;
/*本按键驱动的中断服务程序*/
static irqreturn_t buttons_interrupt(int irq, void *dev_id)
{
struct button_irq_desc *button_irqs = (struct button_irq_desc *)dev_id;
int down;
// udelay(0);
/*获取被按下的按键状态*/
down = !s3c2410_gpio_getpin(button_irqs->pin);
/*状态改变,按键被按下,从这句可以看出,当按键没有被按下的时候,寄存器的值为1(上拉),但按
键被按下的时候,寄存器对应的值为0*/
if (down != (key_values[button_irqs->number] & 1)) { // Changed
/*如果key1 被按下,则key_value[0]就变为’1’,对应的ASCII 码为31*/
key_values[button_irqs->number] = '0' + down;
ev_press = 1; /*设置中断标志为1*/
wake_up_interruptible(&button_waitq); /*唤醒等待队列*/
}
return IRQ_RETVAL(IRQ_HANDLED);
}
/*
*在应用程序执行open(“/dev/buttons”,…)时会调用到此函数,在这里,它的作用主要是注册6 个按键的中断。
*所用的中断类型是IRQ_TYPE_EDGE_BOTH,也就是双沿触发,在上升沿和下降沿均会产生中断,这样做
是为了更加有效地判断按键状态
*/
static int s3c24xx_buttons_open(struct inode *inode, struct file *file)
{
int i;
int err = 0;
for (i = 0; i < sizeof(button_irqs)/sizeof(button_irqs[0]); i++) {
if (button_irqs[i].irq < 0) {
continue;
}
/*注册中断函数*/
err = request_irq(button_irqs[i].irq, buttons_interrupt, IRQ_TYPE_EDGE_BOTH,
button_irqs[i].name, (void *)&button_irqs[i]);
if (err)
break;
}
if (err) { /*如果出错,释放已经注册的中断,并返回*/
i--;
for (; i >= 0; i--) {
if (button_irqs[i].irq < 0) {
continue;
}
disable_irq(button_irqs[i].irq);
free_irq(button_irqs[i].irq, (void *)&button_irqs[i]);
}
return -EBUSY;
}
/*注册成功,则中断队列标记为1,表示可以通过read 读取*/
ev_press = 1;
/*正常返回*/
return 0;
}
/*
*此函数对应应用程序的系统调用close(fd)函数,在此,它的主要作用是当关闭设备时释放6 个按键的中断*
处理函数
*/
static int s3c24xx_buttons_close(struct inode *inode, struct file *file)
{
int i;
for (i = 0; i < sizeof(button_irqs)/sizeof(button_irqs[0]); i++) {
if (button_irqs[i].irq < 0) {
continue;
}
/*释放中断号,并注销中断处理函数*/
free_irq(button_irqs[i].irq, (void *)&button_irqs[i]);
}
return 0;
}
/*
*对应应用程序的read(fd,…)函数,主要用来向用户空间传递键值
*/
static int s3c24xx_buttons_read(struct file *filp, char __user *buff, size_t count, loff_t *offp)
{
unsigned long err;
if (!ev_press) {
if (filp->f_flags & O_NONBLOCK)
/*当中断标识为0 时,并且该设备是以非阻塞方式打开时,返回*/
return -EAGAIN;
else
/*当中断标识为0 时,并且该设备是以阻塞方式打开时,进入休眠状态,等待被唤醒*/
wait_event_interruptible(button_waitq, ev_press);
}
/*把中断标识清零*/
ev_press = 0;
/*一组键值被传递到用户空间*/
err = copy_to_user(buff, (const void *)key_values, min(sizeof(key_values), count));
return err ? -EFAULT : min(sizeof(key_values), count);
}
static unsigned int s3c24xx_buttons_poll( struct file *file, struct poll_table_struct *wait)
{
unsigned int mask = 0;
/*把调用poll 或者select 的进程挂入队列,以便被驱动程序唤醒*/
poll_wait(file, &button_waitq, wait);
if (ev_press)
mask |= POLLIN | POLLRDNORM;
return mask;
}
/*设备操作集*/
static struct file_operations dev_fops = {
.owner = THIS_MODULE,
.open = s3c24xx_buttons_open,
.release = s3c24xx_buttons_close,
.read = s3c24xx_buttons_read,
.poll = s3c24xx_buttons_poll,
};
static struct miscdevice misc = {
.minor = MISC_DYNAMIC_MINOR,
.name = DEVICE_NAME,
.fops = &dev_fops,
};
/*设备初始化,主要是注册设备*/
static int __init dev_init(void)
{
int ret;
/*把按键设备注册为misc 设备,其设备号是自动分配的*/
ret = misc_register(&misc);
if(ret < 0)
{
printk(DEVICE_NAME "register falid!\n");
return ret;
}
printk (DEVICE_NAME"\tinitialized\n");
return 0;
}
/*注销设备*/
static void __exit dev_exit(void)
{
misc_deregister(&misc);
}
module_init(dev_init); //模块初始化,仅当使用insmod/podprobe 命令加载时有用,如果设备不是通过模块方式加载,此处将不会被调用
module_exit(dev_exit); //卸载模块,当该设备通过模块方式加载后,可以通过rmmod 命令卸载,将调用此函数
MODULE_LICENSE("GPL"); //版权信息
MODULE_AUTHOR("singleboy."); //作者名字
Edit the Kconfig file:
config SMDK2440_BUTTONS
tristate "Buttons driver for SMDK2440 development boards"
depends on SMDK2440_CPU2440
default y if SMDK2440_CPU2440
help
this is buttons driver for SMDK2440 development boards
Also change the Makefile:
obj-$(CONFIG_SMDK2440_BUTTONS) += smdk2440_buttons.o
Make the kernel out and verify it on board.
Test code:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/select.h>
#include <sys/time.h>
#include <errno.h>
int main(void)
{
int buttons_fd;
char buttons[6] = {'0', '0', '0', '0', '0', '0'}; //定义按键值变量,对于驱动函数中的key_values 数组
buttons_fd = open("/dev/buttons", 0); /*打开按键设备/dev/buttons*/
if (buttons_fd < 0) {
perror("open device buttons"); /*打开失败则退出*/
exit(1);
}
for (;;) { /*永读按键并打印键值和状态*/
char current_buttons[6];
int count_of_changed_key;
int i;
/*使用read 函数读取一组按键值(6 个)*/
if (read(buttons_fd, current_buttons, sizeof current_buttons) != sizeof current_buttons) {
perror("read buttons:");
exit(1);
}
/*逐个分析读取到的按键值*/
for (i = 0, count_of_changed_key = 0; i < sizeof buttons / sizeof buttons[0]; i++) {
if (buttons[i] != current_buttons[i]) {
buttons[i] = current_buttons[i];
/*打印按键值,并标明按键按下/抬起的状态*/
printf("%skey %d is %s", count_of_changed_key? ", ": "", i+1, buttons[i] == '0' ? "up" : "down");
count_of_changed_key++;
}
}
if (count_of_changed_key) {
printf("\n");
}
}
close(buttons_fd); /*关闭按键设备文件*/
return 0;
}
Test Result:
/root # ./buttons
key 1 is down
key 1 is up
key 2 is down
key 2 is up
key 3 is down
key 3 is up
key 4 is down