
SPI连接raspberryPI和Arduino
Dec 29, 2013
Technology
下面是使用SPI在RaspberryPI和Arduino Nano w之间进行双机通信的一个例子。借助它可以很好的理解SPI的工作原理。
###背景知识
RaspberryPI GPIO布局图:
从图中我们可以看到,RaspberryPI上与SPI通信相关的主要是GPIO 10(MOSI), GPIO 9(MISO)和GPIO 11(SCLK).
Arduino布局图:
SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). These pins support SPI communication using the SPI library. SS代表Slava Select.
事实上我们要使用的仅仅是11/12/13三个口而已。
###连线图
如下图进行连线,简单来说,R(10 MOSI)->A(12 MISO), R(9, MISO)->A(11, MOSI), R(11, SCLK) ->A(13, SCK):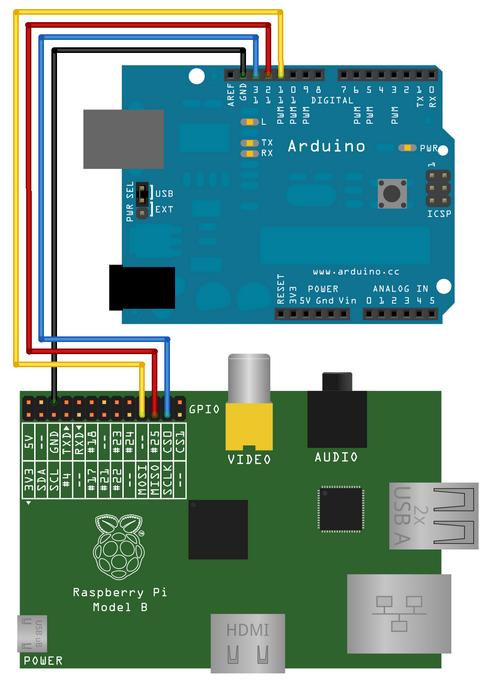 ###Arduino端程序
###Arduino端程序
// Written by Nick Gammon
// February 2011
/**
* Send arbitrary number of bits at whatever clock rate (tested at 500 KHZ and 500 HZ).
* This script will capture the SPI bytes, when a '\n' is recieved it will then output
* the captured byte stream via the serial.
*/
#include <SPI.h>
char buf [100];
volatile byte pos;
volatile boolean process_it;
void setup (void)
{
Serial.begin (115200); // debugging
// have to send on master in, *slave out*
pinMode(MISO, OUTPUT);
// turn on SPI in slave mode
SPCR |= _BV(SPE);
//SPCR is Arduino SPI Control Register
// __BV's definition is like : #define _BV(bit) (1 << (bit))
// SPE is the register of the SPI Enable
// get ready for an interrupt
pos = 0; // buffer empty
process_it = false;
// now turn on interrupts
SPI.attachInterrupt();
} // end of setup
// SPI interrupt routine
ISR (SPI_STC_vect)
{
byte c = SPDR; // grab byte from SPI Data Register
// add to buffer if room
if (pos < sizeof buf)
{
buf [pos++] = c;
// example: newline means time to process buffer
if (c == '\n')
process_it = true;
} // end of room available
} // end of interrupt routine SPI_STC_vect
// main loop - wait for flag set in interrupt routine
void loop (void)
{
if (process_it)
{
buf [pos] = 0;
Serial.println (buf);
pos = 0;
process_it = false;
} // end of flag set
} // end of loop
Code Walking through:
Arduino SPI Control Register (SPCR), set it to
SPCR |= _BV(SPE);
SPI Data Register (SPDR), SPI数据寄存器。 中断程序中,每次从SPDR中取回一个byte 并存储在c中。
if (c == '\n')
process_it = true;
这里通过设置全局变量process_it来影响loop中对接收数据的处理,在loop()中有如下代码段:
if (process_it)
{
//.....
}
从上面看到,如果process_it为0,则loop中一直在空循环,只有当所有的数据全部接收完毕后,才会一次性打印出所有的数据。在打印完数据后,程序将自动将buf清0, 清0是通过将pos简单置0而实现的,实际的数据其实还在。 ###RaspberryPI 端程序
/*
* SPI testing utility (using spidev driver)
*
* Copyright (c) 2007 MontaVista Software, Inc.
* Copyright (c) 2007 Anton Vorontsov <avorontsov@ru.mvista.com>
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License.
*
* Cross-compile with cross-gcc -I/path/to/cross-kernel/include
*/
#include <stdint.h>
#include <unistd.h>
#include <stdio.h>
#include <stdlib.h>
#include <getopt.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <linux/types.h>
#include <linux/spi/spidev.h>
#define ARRAY_SIZE(a) (sizeof(a) / sizeof((a)[0]))
static void pabort(const char *s)
{
perror(s);
abort();
}
static const char *device = "/dev/spidev0.0";
static uint8_t mode;
static uint8_t bits = 8;
static uint32_t speed = 500000;
static uint16_t delay;
static void transfer(int fd)
{
int ret;
uint8_t tx[] = {
0x48, 0x45, 0x4C, 0x4C, 0x4F,
0x20,
0x57, 0x4F, 0x52, 0x4C, 0x44,
0x0A
};
uint8_t rx[ARRAY_SIZE(tx)] = {0, };
struct spi_ioc_transfer tr = {
.tx_buf = (unsigned long)tx,
.rx_buf = (unsigned long)rx,
.len = ARRAY_SIZE(tx),
.delay_usecs = delay,
.speed_hz = speed,
.bits_per_word = bits,
};
ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr);
if (ret < 1)
pabort("can't send spi message");
/*
for (ret = 0; ret < ARRAY_SIZE(tx); ret++) {
if (!(ret % 6))
puts("");
printf("%.2X ", rx[ret]);
}
puts("");
*/
}
static void print_usage(const char *prog)
{
printf("Usage: %s [-DsbdlHOLC3]\n", prog);
puts(" -D --device device to use (default /dev/spidev1.1)\n"
" -s --speed max speed (Hz)\n"
" -d --delay delay (usec)\n"
" -b --bpw bits per word \n"
" -l --loop loopback\n"
" -H --cpha clock phase\n"
" -O --cpol clock polarity\n"
" -L --lsb least significant bit first\n"
" -C --cs-high chip select active high\n"
" -3 --3wire SI/SO signals shared\n");
exit(1);
}
static void parse_opts(int argc, char *argv[])
{
while (1) {
static const struct option lopts[] = {
{ "device", 1, 0, 'D' },
{ "speed", 1, 0, 's' },
{ "delay", 1, 0, 'd' },
{ "bpw", 1, 0, 'b' },
{ "loop", 0, 0, 'l' },
{ "cpha", 0, 0, 'H' },
{ "cpol", 0, 0, 'O' },
{ "lsb", 0, 0, 'L' },
{ "cs-high", 0, 0, 'C' },
{ "3wire", 0, 0, '3' },
{ "no-cs", 0, 0, 'N' },
{ "ready", 0, 0, 'R' },
{ NULL, 0, 0, 0 },
};
int c;
c = getopt_long(argc, argv, "D:s:d:b:lHOLC3NR", lopts, NULL);
if (c == -1)
break;
switch (c) {
case 'D':
device = optarg;
break;
case 's':
speed = atoi(optarg);
break;
case 'd':
delay = atoi(optarg);
break;
case 'b':
bits = atoi(optarg);
break;
case 'l':
mode |= SPI_LOOP;
break;
case 'H':
mode |= SPI_CPHA;
break;
case 'O':
mode |= SPI_CPOL;
break;
case 'L':
mode |= SPI_LSB_FIRST;
break;
case 'C':
mode |= SPI_CS_HIGH;
break;
case '3':
mode |= SPI_3WIRE;
break;
case 'N':
mode |= SPI_NO_CS;
break;
case 'R':
mode |= SPI_READY;
break;
default:
print_usage(argv[0]);
break;
}
}
}
int main(int argc, char *argv[])
{
int ret = 0;
int fd;
parse_opts(argc, argv);
fd = open(device, O_RDWR);
if (fd < 0)
pabort("can't open device");
/*
* spi mode
*/
ret = ioctl(fd, SPI_IOC_WR_MODE, &mode);
if (ret == -1)
pabort("can't set spi mode");
ret = ioctl(fd, SPI_IOC_RD_MODE, &mode);
if (ret == -1)
pabort("can't get spi mode");
/*
* bits per word
*/
ret = ioctl(fd, SPI_IOC_WR_BITS_PER_WORD, &bits);
if (ret == -1)
pabort("can't set bits per word");
ret = ioctl(fd, SPI_IOC_RD_BITS_PER_WORD, &bits);
if (ret == -1)
pabort("can't get bits per word");
/*
* max speed hz
*/
ret = ioctl(fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed);
if (ret == -1)
pabort("can't set max speed hz");
ret = ioctl(fd, SPI_IOC_RD_MAX_SPEED_HZ, &speed);
if (ret == -1)
pabort("can't get max speed hz");
printf("spi mode: %d\n", mode);
printf("bits per word: %d\n", bits);
printf("max speed: %d Hz (%d KHz)\n", speed, speed/1000);
transfer(fd);
close(fd);
return ret;
}
解析: 在main()函数中,设置完spi总线的相关参数后,调用transfer(fd)来传递参数。
transfer()函数的实现如下:
static void transfer(int fd)
{
int ret;
uint8_t tx[] = {
0x48, 0x45, 0x4C, 0x4C, 0x4F,
0x20,
0x57, 0x4F, 0x52, 0x4C, 0x44,
0x0A
};
uint8_t rx[ARRAY_SIZE(tx)] = {0, };
struct spi_ioc_transfer tr = {
.tx_buf = (unsigned long)tx,
.rx_buf = (unsigned long)rx,
.len = ARRAY_SIZE(tx),
.delay_usecs = delay,
.speed_hz = speed,
.bits_per_word = bits,
};
ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr);
if (ret < 1)
pabort("can't send spi message");
/*
for (ret = 0; ret < ARRAY_SIZE(tx); ret++) {
if (!(ret % 6))
puts("");
printf("%.2X ", rx[ret]);
}
puts("");
*/
}
tx即为字符串,‘H'=0x48, ‘E'=0x45, ‘L'=0x4c, ‘L'=0x4c, ‘O'=0x4f, ' ‘=0x20, ‘W'=0x57, ‘O'=0x4f, ‘R'=0x52, ‘L'=0x4c, ‘D'=0x44, ‘\n'=0x0a.
实际传送则是调用:
ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr);
有关它的解释如下:
SPI_IOC_MESSAGE gives userspace the equivalent of kernel spi_sync().
72 * Pass it an array of related transfers, they'll execute together.
73 * Each transfer may be half duplex (either direction) or full duplex.
74 *
75 * struct spi_ioc_transfer mesg[4];
76 * ...
77 * status = ioctl(fd, SPI_IOC_MESSAGE(4), mesg);
#define SPI_IOC_MESSAGE(N) _IOW(SPI_IOC_MAGIC, 0, char[SPI_MSGSIZE(N)])
调用完transfer()函数后,调用close()来关闭文件描述符。