
关于STM32板上的12864液晶(2)
Nov 28, 2013
Technology
###有关电路 上一章讲的是12864的基础知识。这一章里来看12864和stm32板的连接和驱动的问题。
有关12864小LCD的连接,在PDF中我们可以找到如下的表项:
| 功能模块 | 占用模块 | 备注 |
|---|---|---|
| 12864小LCD | PC4,PB2,PB11,PB13,PB15 | PC4:A0,同时也是 CH375 和 TFT 的 A0;PB2:BOOT1,LCD 的 CS 脚;PB11:28J60 和大小 LCD 的复位脚 |
再结合电路图: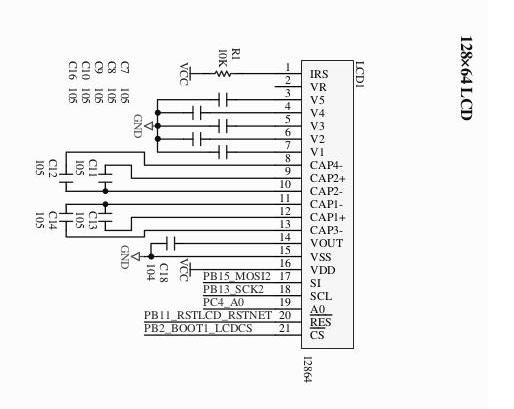
关于GPIO口的设置,我们可以看到有这样的定义:
typedef enum
{ GPIO_Mode_AIN = 0x0,
GPIO_Mode_IN_FLOATING = 0x04,
GPIO_Mode_IPD = 0x28,
GPIO_Mode_IPU = 0x48,
GPIO_Mode_Out_OD = 0x14,
GPIO_Mode_Out_PP = 0x10,
GPIO_Mode_AF_OD = 0x1C,
GPIO_Mode_AF_PP = 0x18
}GPIOMode_TypeDef;
而在stm32的Datasheet中有如下的配置模式: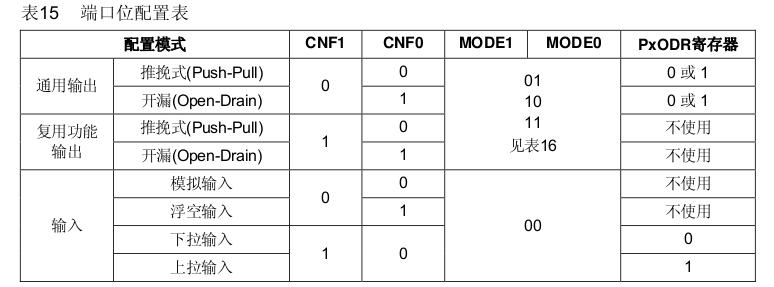
最低的8个bit和表中是一一对应的,其中通用输出/复用功能输出的mode1/mode0的值为00.
因为PB15是MOSI2口, PB13是SCK2口,所以这两个管脚需要被设置为AF模式的。AF代表复用功能。PP代表push-pull.
/* PB15-MOSI2,PB13-SCK2*/
/* Why PB14 should be enabled? */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 |GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
PB11和PB2属于output口,所以直接设置为out口即可。
有关SPI2口的配置, 在STM中的代码如下:
/* SPI2 configuration */
SPI_Cmd(SPI2, DISABLE); //必须先禁能,才能改变MODE
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //两线全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //主
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //8位
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //CPOL=1 时钟悬空高
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //CPHA=1 数据捕获第2个
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //软件NSS
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2; //2分频
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //高位在前
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC7
SPI_Init(SPI2, &SPI_InitStructure);
SPI_Cmd(SPI2, ENABLE);
###有关SPI总线
SPI接口是Motorola 首先提出的全双工三线同步串行外围接口,采用主从模式(Master Slave)架构;支持多slave模式应用,一般仅支持单Master。时钟由Master控制,在时钟移位脉冲下,数据按位传输,高位在前,低位在后(MSB first);SPI接口有2根单向数据线,为全双工通信,目前应用中的数据速率可达几Mbps的水平。
stm32中关于SPI传送字节的函数编写
static u8 SPIByte(u8 byte)
{
/*等待发送寄存器空*/
while((SPI2->SR & SPI_I2S_FLAG_TXE)==RESET);
/*发送一个字节*/
SPI2->DR = byte;
/* 等待接收寄存器有效*/
while((SPI2->SR & SPI_I2S_FLAG_RXNE)==RESET);
return(SPI2->DR);
}
命令和数据是调用这个函数写入的,我们需要注意的是时序,在写入总线时需要先拉低/高A0线
//写命令
void LcdCmd(u8 cmd)
{
CSLCDS_L;
A0_L;
//__nop();
;
SPIByte(cmd);
//__nop();
;
CSLCDS_H;
}
//写数据
void LcdDat(u8 dat)
{
CSLCDS_L;
A0_H;
//__nop();
;
SPIByte(dat);
//__nop();
;
CSLCDS_H;
}