Using HMC5883L to control Servo
Nov 18, 2013
Technology
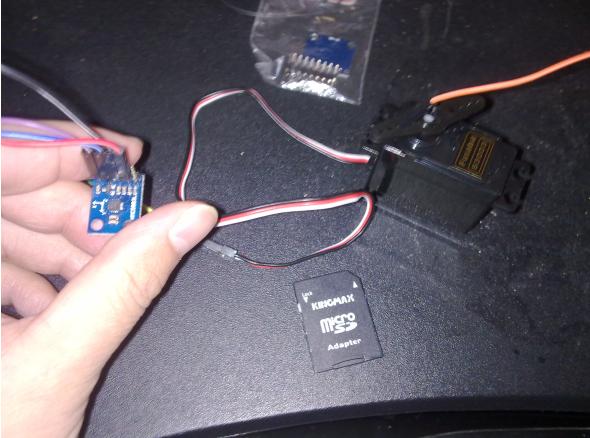
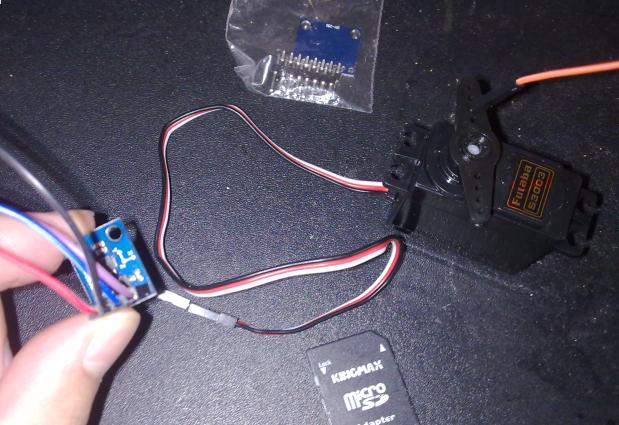
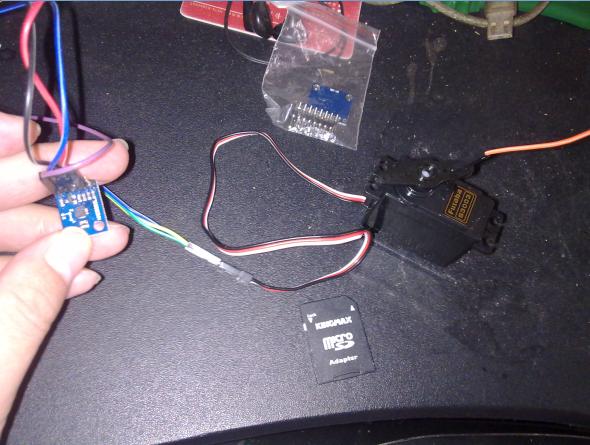
###Wired
__Servo __
5V/GND
Input–> D4
__HMC5883L __
3.3V/GND
SCL–> A5
SDA–> A4
###Code:
#include <Wire.h>
#include <HMC5883L.h>
HMC5883L compass;
//Definition of servopin
int servopin = 4;
void setup(){
Serial.begin(9600);
Wire.begin();
compass = HMC5883L(); //new instance of HMC5883L library
setupHMC5883L(); //setup the HMC5883L
pinMode(servopin,OUTPUT);//设定舵机接口为输出接口
}
// Our main program loop.
void loop(){
float heading = getHeading();
//Serial.println(heading);
int angle = (int)heading/2;
/*
int angle = (int)heading;
if(angle > 180)
{
angle = angle - 180;
}
*/
Serial.println(angle);
//发送50个脉冲
for(int i=0;i<50;i++)
{
//引用脉冲函数
servopulse(angle);
}
delay(100); //only here to slow down the serial print
}
void setupHMC5883L(){
//Setup the HMC5883L, and check for errors
int error;
error = compass.SetScale(1.3); //Set the scale of the compass.
if(error != 0) Serial.println(compass.GetErrorText(error)); //check if there
is an error, and print if so
error = compass.SetMeasurementMode(Measurement_Continuous); // Set the
measurement mode to Continuous
if(error != 0) Serial.println(compass.GetErrorText(error)); //check if there
is an error, and print if so
}
float getHeading(){
//Get the reading from the HMC5883L and calculate the heading
MagnetometerScaled scaled = compass.ReadScaledAxis(); //scaled values from
compass.
float heading = atan2(scaled.YAxis, scaled.XAxis);
// Correct for when signs are reversed.
if(heading < 0) heading += 2*PI;
if(heading > 2*PI) heading -= 2*PI;
return heading * RAD_TO_DEG; //radians to degrees
}
void servopulse(int angle)//定义一个脉冲函数
{
int pulsewidth=(angle*11)+500; //将角度转化为500-2480的脉宽值
digitalWrite(servopin,HIGH); //将舵机接口电平至高
delayMicroseconds(pulsewidth); //延时脉宽值的微秒数
digitalWrite(servopin,LOW); //将舵机接口电平至低
delayMicroseconds(20000-pulsewidth);
}
#Result: The servo will change direction according to the compass’s direction. because the compass’s range is from 0 to 360, while Servo could only serve for 180 degrees, we need to change th input parameter of compass by divide 2.